杭州個人機器人控制系統
控制器是整個控制系統的中心組件,主要由控制芯片、調節器、存儲器、接口和顯示器等構成。控制器負責機器人控制程序的運行、傳感器數據的采集以及執行器命令的下達和轉換。通過運行控制算法,控制器能夠精確控制機器人的運動軌跡和操作行為。軟件部分主要包括操作系統、控制算法和程序接口。操作系統負責管理整個系統的進程、資源和接口,保證系統的穩定和可靠性。控制算法是機器人控制系統的中心技術,包括機器人運動學和動力學算法、傳感器數據處理算法和機器人決策算法等,直接決定了機器人的運動和操作行為。程序接口則為其他軟件模塊提供接口和協議支持,便于系統的集成和擴展。機器人控制系統可以實現機器人的自主決策和任務規劃功能。杭州個人機器人控制系統
機器人控制系統在生產制造領域中起著重要的作用。隨著科技的不斷進步,機器人在工業生產中的應用越來越廣闊。機器人控制系統是機器人能夠完成各種任務的關鍵。它通過對機器人的運動、感知和決策進行控制,使機器人能夠高效地完成各種生產任務。機器人控制系統可以提高生產效率。機器人可以根據預先設定的程序進行工作,不需要休息和休假,可以24小時不間斷地工作。而且,機器人的速度和精度遠遠超過人類,可以完成一些復雜和精細的工作。通過機器人控制系統的精確控制,可以使機器人的運動更加準確和高效,從而提高生產效率。機器人控制系統可以提高生產質量。機器人在生產過程中可以減少人為因素的干擾,減少了人為錯誤的發生。機器人的運動和操作可以精確控制,可以保證產品的一致性和質量的穩定性。而且,機器人可以進行精細的檢測和測量,可以及時發現和修正生產過程中的問題,從而提高產品的質量。湖州機器人控制系統包括什么機器人控制系統內置了故障自診斷功能,能在發現問題時立即采取應急措施。
機器人控制系統的另一個重要特點是其精確性。機器人控制系統可以實現高精度的運動控制和位置定位,確保機器人在執行任務時能夠準確地達到指定的位置和姿態要求。 首先,機器人控制系統可以通過精確的傳感器和測量裝置實現高精度的位置定位。例如,通過激光測距儀、視覺傳感器等,機器人可以實時獲取自身位置和周圍環境的信息,從而精確地計算和控制機器人的運動軌跡和位置。 其次,機器人控制系統可以通過高精度的執行器和伺服控制實現精確的運動控制。例如,通過精密的電機和伺服控制器,機器人可以實現精確的速度和位置控制,確保機器人在執行任務時能夠按照預定的軌跡和速度進行運動。 此外,機器人控制系統還可以通過閉環控制和反饋機制實現精確的動態調整。通過實時監測和分析機器人的運動狀態和姿態,控制系統可以根據需要進行動態調整和修正,以保持機器人的精確性和穩定性。 綜上所述,機器人控制系統的精確性是其重要的特點之一。這種精確性使得機器人能夠在執行任務時能夠準確地達到指定的位置和姿態要求,提高了機器人的工作效率和可靠性,為各種應用場景帶來了巨大的價值和潛力。
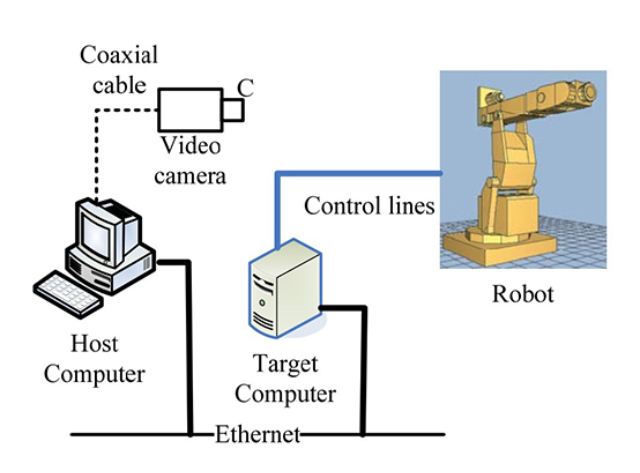
機器人控制系統是指用于控制機器人運動和執行任務的一系列軟硬件組件和算法。它是機器人技術中至關重要的一部分,決定了機器人的性能和功能。機器人控制系統通常由以下幾個組件組成:傳感器、執行器、控制器和算法。傳感器用于感知機器人周圍的環境和狀態,例如攝像頭、激光雷達和力傳感器等。執行器用于控制機器人的運動,例如電機和液壓缸等。控制器是機器人控制系統的中心,負責接收傳感器數據并根據預定的算法生成控制信號,控制機器人的運動和行為。算法是機器人控制系統的靈魂,決定了機器人的智能和自主性。機器人控制系統的設計和開發是一個復雜的過程。首先,需要根據機器人的任務和應用場景選擇合適的傳感器和執行器。然后,需要設計和實現控制器,包括硬件和軟件部分。通過編程接口,工程師可以輕松地為機器人控制系統編寫新的指令集,擴展其功能。
機器人控制系統在醫療領域中起著重要的作用。隨著人口老齡化的加劇和醫療需求的增加,機器人在醫療領域的應用越來越廣闊。機器人控制系統是機器人能夠完成各種醫療任務的關鍵。它通過對機器人的運動、感知和決策進行控制,使機器人能夠高效地完成各種醫療任務。機器人控制系統可以提高手術的精確性和安全性。機器人可以通過高精度的運動和操作,實現對患者的精確診療。機器人可以進行微創手術,減少手術創傷和恢復時間。通過機器人控制系統的監控和保護,可以及時發現和處理手術中的異常情況,保證手術的安全性。機器人控制系統可以提高醫療資源的利用效率。機器人可以承擔一些繁重和重復性高的醫療工作,減輕醫護人員的負擔。機器人可以進行精細的檢測和測量,提供準確的醫療數據。通過機器人控制系統的分析和處理,可以提供更加準確和及時的診斷結果,提高醫療資源的利用效率。借助高效的能源管理系統,機器人控制系統確保了機器人在長時間運行中的穩定性和效率。常州個人機器人控制系統聯系電話
執行器是機器人的動作執行部件,如電機、液壓缸和氣動馬達等。杭州個人機器人控制系統
機器人控制系統相較于傳統控制系統,其復雜性和先進性體現在多個方面。首先,機器人控制系統具有極高的協調性。由于機器人通常具備多個自由度,即使是簡單的工業機器人也有3至5個自由度,每個自由度包含一個伺服機構。這些伺服機構在執行控制指令時會產生聯動反應,因此,控制系統需要精確協調這些伺服機構,以確保機器人運動的正確性和穩定性。這種協調性不僅體現在各自由度之間的同步運動上,還體現在對機器人整體運動軌跡的精確控制上。 其次,機器人控制系統具有極高的重復定位精度,一般可達到+0.1mm。這種高精度要求控制系統在控制機器人運動時,必須保持極高的穩定性和抗干擾能力。無論是外部環境的變化還是內部機械結構的微小變動,都不能對機器人的定位精度產生影響。這種高精度特性使得機器人在執行精密加工、裝配等任務時具有極高的可靠性和效率。杭州個人機器人控制系統
無錫市點杰自動化科技有限公司在同行業領域中,一直處在一個不斷銳意進取,不斷制造創新的市場高度,多年以來致力于發展富有創新價值理念的產品標準,在江蘇省等地區的商務服務中始終保持良好的商業口碑,成績讓我們喜悅,但不會讓我們止步,殘酷的市場磨煉了我們堅強不屈的意志,和諧溫馨的工作環境,富有營養的公司土壤滋養著我們不斷開拓創新,勇于進取的無限潛力,無錫市點杰自動化供應攜手大家一起走向共同輝煌的未來,回首過去,我們不會因為取得了一點點成績而沾沾自喜,相反的是面對競爭越來越激烈的市場氛圍,我們更要明確自己的不足,做好迎接新挑戰的準備,要不畏困難,激流勇進,以一個更嶄新的精神面貌迎接大家,共同走向輝煌回來!
- 嘉興個人PLC控制系統多少錢 2025-06-07
- 常州電商智能倉儲系統聯系電話 2025-06-07
- 上海企業PLC控制系統價格 2025-06-07
- 嘉興品牌PLC控制系統哪家好 2025-06-07
- 杭州常規機器人控制系統價格 2025-06-07
- 溫州互聯網智能倉儲系統有哪些 2025-06-07
- 常州網絡機器人控制系統多少錢 2025-06-07
- 嘉興智能化PLC控制系統有哪些 2025-06-07
- 杭州什么是智能倉儲系統哪家好 2025-06-07
- 嘉興智能化智能倉儲系統價格 2025-06-07
- 上海個人信息安全詢問報價 2025-06-07
- 湖南心理咨詢聯系方式 2025-06-07
- 重慶財務管理以客為尊 2025-06-07
- 嘉興創新企業數據安全解決方案價格行情 2025-06-07
- 蘇州哪些國內集裝箱貨物運輸代理要多少錢 2025-06-07
- 順義區第三方智能化人力資源系統加盟費用 2025-06-07
- 相城區本地展覽展示服務電話 2025-06-07
- 清遠鋼筋工找活軟件 2025-06-07
- 貴州設計服務咨詢報價 2025-06-07
- 天津什么企業紅木家具值得推薦 2025-06-07